Quick Insights:
- Problem: Rendering virtual 3D content in real scenes requires accurate camera intrinsics, distortion removal and pose estimation from real-world markers.
-
Solution:
Calibrated the camera with multiple checkerboard images, estimated
rotation and translation vectors using
solvePnP, and projected the vertices of a virtual prism withprojectPoints. - Result: A stable augmented reality effect where the virtual object tracks the checkerboard marker’s position, orientation and perspective in real time.
Introduction
This project implements a classical computer vision AR system without deep learning. Using a printed checkerboard, the camera’s intrinsic matrix and distortion parameters were estimated. With these, the pose relative to the marker was recovered frame-by-frame and a virtual 3D prism was rendered at the correct physical location on the board.
- Computed intrinsics + distortion from multiple checkerboard views
-
Used
solvePnPto obtain rotation + translation vectors - Projected a 3D object model using
projectPoints - Maintained alignment even under changes in angle and distance
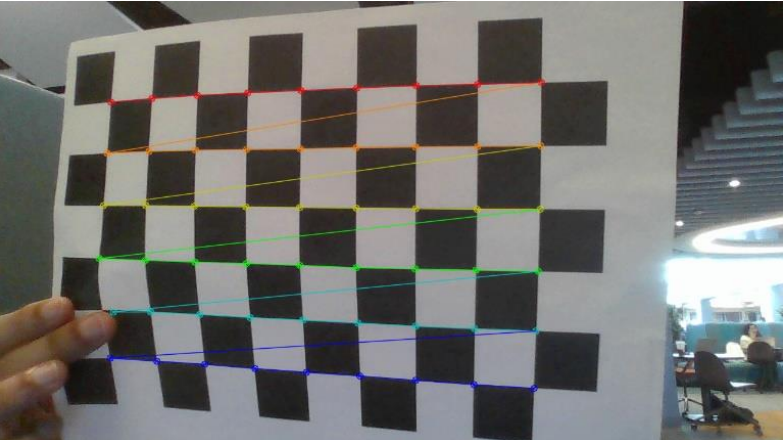
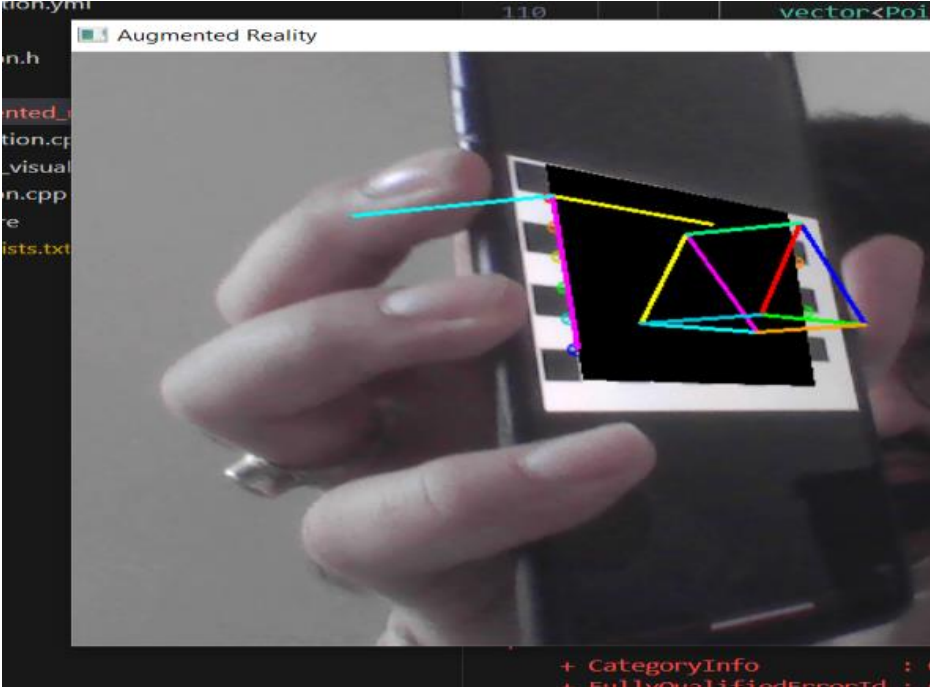
Demonstration
The pipeline below shows the two key stages: pose estimation via checkerboard detection and virtual object rendering.

Representative Code Snippet
// Estimate pose from checkerboard points
solvePnP(objectPoints, imagePoints,
cameraMatrix, distCoeffs,
rvec, tvec);
// Project 3D prism vertices into image space
projectPoints(prismVertices, rvec, tvec,
cameraMatrix, distCoeffs,
projected2D);
// Draw edges between projected points
for (auto &edge : prismEdges) {
line(frame, projected2D[edge.first],
projected2D[edge.second],
Scalar(0, 255, 255), 2);
}
Why It Matters
This project recreates the core of ARKit/ARCore-style tracking using only geometry and OpenCV. It demonstrates practical understanding of camera projection, pose estimation and real-time rendering—all foundational skills for AR, robotics, SLAM and computer vision work.
- Strengthened understanding of intrinsic/extrinsic calibration
- Implemented real-time AR without ML or heavy frameworks
- Built end-to-end geometric intuition for projection pipelines
- Created a clean demonstration of classical CV-based AR